
仿人五指灵巧手采用创新型直线驱动设计,具有6个自由度和12个运动关节,结合力位混合控制算法,可以模拟人手进行诸如弹琴、猜拳等复杂动作。
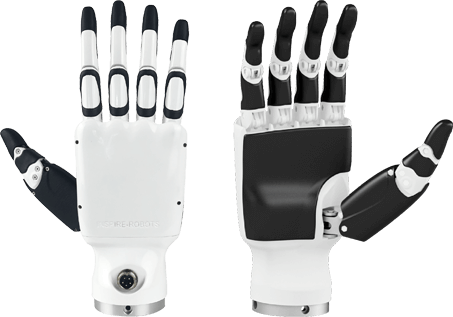
仿人五指灵巧手采用创新型直线驱动设计,具有6个自由度和12个运动关节,结合力位混合控制算法,可以模拟人手实现精准的抓取操作。

北京因时机器人科技有限公司创立于2016年,公司总部位于北京石景山,是一家专注于微型精密运动部件研发制造和伺服控制技术突破创新的高新技术企业,致力于为机器人、生物医疗及自动化等行业提供高性能核心运动部件!
销售热线:400 666 5160
北京总机:010-68868085
售前咨询:sales@inspire-robots.com
其他合作:info@inspire-robots.com







